 |
| August 18, 2020 | Volume 16 Issue 31 |
Motion Control News & Products

Designfax weekly eMagazine

Archives
Partners
Manufacturing Center
Product Spotlight
Modern Applications News
Metalworking Ideas For
Today's Job Shops
Tooling and Production
Strategies for large
metalworking plants
Overhung load adaptors provide load support and contamination protection
 Overhung load adaptors (OHLA) provide both overhung radial and axial load support to protect electrified mobile equipment motors from heavy application loads, extending the lifetime of the motor and alleviating the cost of downtime both from maintenance costs and loss of production. They seal out dirt, grime, and other contaminants too. Zero-Max OHLAs are available in an extensive offering of standard models (including Extra-Duty options) for typical applications or customized designs.
Overhung load adaptors (OHLA) provide both overhung radial and axial load support to protect electrified mobile equipment motors from heavy application loads, extending the lifetime of the motor and alleviating the cost of downtime both from maintenance costs and loss of production. They seal out dirt, grime, and other contaminants too. Zero-Max OHLAs are available in an extensive offering of standard models (including Extra-Duty options) for typical applications or customized designs.
Learn more.
Why choose electric for linear actuators?
 Tolomatic has been delivering a new type of linear motion technology that is giving hydraulics a run for its money. Learn the benefits of electric linear motion systems, the iceberg principle showing total cost of ownership, critical parameters of sizing, and conversion tips.
Tolomatic has been delivering a new type of linear motion technology that is giving hydraulics a run for its money. Learn the benefits of electric linear motion systems, the iceberg principle showing total cost of ownership, critical parameters of sizing, and conversion tips.
Get this informative e-book. (No registration required)
New AC hypoid inverter-duty gearmotors
 Bodine Electric Company introduces 12 new AC inverter-duty hypoid hollow shaft gearmotors. These type 42R-25H2 and 42R-30H3 drives combine an all-new AC inverter-duty, 230/460-VAC motor with two hypoid gearheads. When used with an AC inverter (VFD) control, these units deliver maintenance-free and reliable high-torque output. They are ideal for conveyors, gates, packaging, and other industrial automation equipment that demands both high torque and low power consumption from the driving gearmotor.
Bodine Electric Company introduces 12 new AC inverter-duty hypoid hollow shaft gearmotors. These type 42R-25H2 and 42R-30H3 drives combine an all-new AC inverter-duty, 230/460-VAC motor with two hypoid gearheads. When used with an AC inverter (VFD) control, these units deliver maintenance-free and reliable high-torque output. They are ideal for conveyors, gates, packaging, and other industrial automation equipment that demands both high torque and low power consumption from the driving gearmotor.
Learn more.
Next-gen warehouse automation: Siemens, Universal Robots, and Zivid partner up
 Universal Robots, Siemens, and Zivid have created a new solution combining UR's cobot arms with Siemens' SIMATIC Robot Pick AI software and Zivid's 3D sensors to create a deep-learning picking solution for warehouse automation and intra-logistics fulfillment. It works regardless of object shape, size, opacity, or transparency and is a significant leap in solving the complex challenges faced by the logistics and e-commerce sectors.
Universal Robots, Siemens, and Zivid have created a new solution combining UR's cobot arms with Siemens' SIMATIC Robot Pick AI software and Zivid's 3D sensors to create a deep-learning picking solution for warehouse automation and intra-logistics fulfillment. It works regardless of object shape, size, opacity, or transparency and is a significant leap in solving the complex challenges faced by the logistics and e-commerce sectors.
Read the full article.
Innovative DuoDrive gear and motor unit is UL/CSA certified
 The DuoDrive integrated gear unit and motor from NORD DRIVE-SYSTEMS is a compact, high-efficiency
solution engineered for users in the fields of intralogistics, pharmaceutical, and the food and beverage industries. This drive combines a IE5+ synchronous motor and single-stage helical gear unit into one compact housing with a smooth, easy-to-clean surface. It has a system efficiency up to 92% and is available in two case sizes with a power range of 0.5 to 4.0 hp.
The DuoDrive integrated gear unit and motor from NORD DRIVE-SYSTEMS is a compact, high-efficiency
solution engineered for users in the fields of intralogistics, pharmaceutical, and the food and beverage industries. This drive combines a IE5+ synchronous motor and single-stage helical gear unit into one compact housing with a smooth, easy-to-clean surface. It has a system efficiency up to 92% and is available in two case sizes with a power range of 0.5 to 4.0 hp.
Learn more.
BLDC flat motor with high output torque and speed reduction
 Portescap's 60ECF brushless DC slotted flat motor is the newest frame size to join its flat motor portfolio. This 60-mm BLDC motor features a 38.2-mm body length and an outer-rotor slotted configuration with an open-body design, allowing it to deliver improved heat management in a compact package. Combined with Portescap gearheads, it delivers extremely high output torque and speed reduction. Available in both sensored and sensorless options. A great choice for applications such as electric grippers and exoskeletons, eVTOLs, and surgical robots.
Portescap's 60ECF brushless DC slotted flat motor is the newest frame size to join its flat motor portfolio. This 60-mm BLDC motor features a 38.2-mm body length and an outer-rotor slotted configuration with an open-body design, allowing it to deliver improved heat management in a compact package. Combined with Portescap gearheads, it delivers extremely high output torque and speed reduction. Available in both sensored and sensorless options. A great choice for applications such as electric grippers and exoskeletons, eVTOLs, and surgical robots.
Learn more and view all the specs.
Application story: Complete gearbox and coupling assembly for actuator system
 Learn how GAM engineers not only sized and selected the appropriate gear reducers and couplings required to drive two ball screws in unison using a single motor, but how they also designed the mounting adapters necessary to complete the system. One-stop shopping eliminated unnecessary components and resulted in a 15% reduction in system cost.
Learn how GAM engineers not only sized and selected the appropriate gear reducers and couplings required to drive two ball screws in unison using a single motor, but how they also designed the mounting adapters necessary to complete the system. One-stop shopping eliminated unnecessary components and resulted in a 15% reduction in system cost.
Read this informative GAM blog.
Next-gen motor for pump and fan applications
 The next evolution of the award-winning Aircore EC motor from Infinitum is a high-efficiency system designed to power commercial and industrial applications such as HVAC fans, pumps, and data centers with less energy consumption, reduced emissions, and reduced waste. It features an integrated variable frequency drive and delivers upward of 93% system efficiency, as well as class-leading power and torque density in a low-footprint package that is 20% lighter than the previous version. Four sizes available.
The next evolution of the award-winning Aircore EC motor from Infinitum is a high-efficiency system designed to power commercial and industrial applications such as HVAC fans, pumps, and data centers with less energy consumption, reduced emissions, and reduced waste. It features an integrated variable frequency drive and delivers upward of 93% system efficiency, as well as class-leading power and torque density in a low-footprint package that is 20% lighter than the previous version. Four sizes available.
Learn more.
Telescoping linear actuators for space-constrained applications
 Rollon's new TLS telescoping linear actuators enable long stroke lengths with minimal closed lengths, which is especially good for applications with minimal vertical clearance. These actuators integrate seamlessly into multi-axis systems and are available in two- or three-stage versions. Equipped with a built-in automated lubrication system, the TLS Series features a synchronized drive system, requiring only a single motor to achieve motion. Four sizes (100, 230, 280, and 360) with up to 3,000-mm stroke length.
Rollon's new TLS telescoping linear actuators enable long stroke lengths with minimal closed lengths, which is especially good for applications with minimal vertical clearance. These actuators integrate seamlessly into multi-axis systems and are available in two- or three-stage versions. Equipped with a built-in automated lubrication system, the TLS Series features a synchronized drive system, requiring only a single motor to achieve motion. Four sizes (100, 230, 280, and 360) with up to 3,000-mm stroke length.
Learn more.
Competitively priced long-stroke parallel gripper
 The DHPL from Festo is a new generation of pneumatic long-stroke grippers that offers a host of advantages for high-load and high-torque applications. It is interchangeable with competitive long-stroke grippers and provides the added benefits of lighter weight, higher precision, and no maintenance. It is ideal for gripping larger items, including stacking boxes, gripping shaped parts, and keeping bags open. It has high repetition accuracy due to three rugged guide rods and a rack-and-pinion design.
The DHPL from Festo is a new generation of pneumatic long-stroke grippers that offers a host of advantages for high-load and high-torque applications. It is interchangeable with competitive long-stroke grippers and provides the added benefits of lighter weight, higher precision, and no maintenance. It is ideal for gripping larger items, including stacking boxes, gripping shaped parts, and keeping bags open. It has high repetition accuracy due to three rugged guide rods and a rack-and-pinion design.
Learn more.
Extend your range of motion: Controllers for mini motors
 FAULHABER has added another extremely compact Motion Controller without housing to its product range. The new MC3603 controller is ideal for integration in equipment manufacturing and medical tech applications. With 36 V and 3 A (peak current 9 A), it covers the power range up to 100 W and is suitable for DC motors with encoder, brushless drives, or linear motors.
FAULHABER has added another extremely compact Motion Controller without housing to its product range. The new MC3603 controller is ideal for integration in equipment manufacturing and medical tech applications. With 36 V and 3 A (peak current 9 A), it covers the power range up to 100 W and is suitable for DC motors with encoder, brushless drives, or linear motors.
Learn more.
When is a frameless brushless DC motor the right choice?
 Frameless BLDC motors fit easily into small, compact machines that require high precision, high torque, and high efficiency, such as robotic applications where a mix of low weight and inertia is critical. Learn from the experts at SDP/SI how these motors can replace heavier, less efficient hydraulic components by decreasing operating and maintenance costs. These motors are also more environmentally friendly than others.
Frameless BLDC motors fit easily into small, compact machines that require high precision, high torque, and high efficiency, such as robotic applications where a mix of low weight and inertia is critical. Learn from the experts at SDP/SI how these motors can replace heavier, less efficient hydraulic components by decreasing operating and maintenance costs. These motors are also more environmentally friendly than others.
View the video.
Tiny and smart: Step motor with closed-loop control
 Nanotec's new PD1-C step motor features an integrated controller and absolute encoder with closed-loop control. With a flange size of merely 28 mm (NEMA 11), this compact motor reaches a max holding torque of 18 Ncm and a peak current of 3 A. Three motor versions are available: IP20 protection, IP65 protection, and a motor with open housing that can be modified with custom connectors. Ideal for applications with space constraints, effectively reducing both wiring complexity and installation costs.
Nanotec's new PD1-C step motor features an integrated controller and absolute encoder with closed-loop control. With a flange size of merely 28 mm (NEMA 11), this compact motor reaches a max holding torque of 18 Ncm and a peak current of 3 A. Three motor versions are available: IP20 protection, IP65 protection, and a motor with open housing that can be modified with custom connectors. Ideal for applications with space constraints, effectively reducing both wiring complexity and installation costs.
Learn more.
Closed loop steppers drive new motion control applications
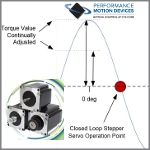 According to the motion experts at Performance Motion Devices, when it comes to step motors, the drive technique called closed loop stepper is making everything old new again and driving a burst of interest in the use of two-phase step motors. It's "winning back machine designers who may have relegated step motors to the category of low cost but low performance."
According to the motion experts at Performance Motion Devices, when it comes to step motors, the drive technique called closed loop stepper is making everything old new again and driving a burst of interest in the use of two-phase step motors. It's "winning back machine designers who may have relegated step motors to the category of low cost but low performance."
Read this informative Performance Motion Devices article.
Intelligent compact drives with extended fieldbus options
 The intelligent PD6 compact drives from Nanotec are now available with Profinet and EtherNet/IP. They combine motor, controller, and encoder in a space-saving package. With its 80-mm flange and a rated power of 942 W, the PD6-EB is the most powerful brushless DC motor of this product family. The stepper motor version has an 86-mm flange (NEMA 34) and a holding torque up to 10 Nm. Features include acceleration feed forward and jerk-limited ramps. Reduced installation time and wiring make the PD6 series a highly profitable choice for machine tools, packaging machines, or conveyor belts.
The intelligent PD6 compact drives from Nanotec are now available with Profinet and EtherNet/IP. They combine motor, controller, and encoder in a space-saving package. With its 80-mm flange and a rated power of 942 W, the PD6-EB is the most powerful brushless DC motor of this product family. The stepper motor version has an 86-mm flange (NEMA 34) and a holding torque up to 10 Nm. Features include acceleration feed forward and jerk-limited ramps. Reduced installation time and wiring make the PD6 series a highly profitable choice for machine tools, packaging machines, or conveyor belts.
Learn more.
Army advances learning capabilities of drone swarms

A small unmanned Clearpath Husky robot was used by ARL researchers to help develop a new technique to quickly teach robots novel traversal behaviors with minimal human oversight. [Credit: U.S. Army]
U.S. Army researchers have developed a reinforcement learning approach that will allow swarms of unmanned aerial and ground vehicles to optimally accomplish various missions while minimizing performance uncertainty.
Swarming is a method of operations where multiple autonomous systems act as a cohesive unit by actively coordinating their actions.
Army researchers said future multi-domain battles will require swarms of dynamically coupled, coordinated heterogeneous mobile platforms to overmatch enemy capabilities and threats targeting U.S. forces.
The Army is looking to swarming technology to be able to execute time-consuming or dangerous tasks, said Dr. Jemin George of the U.S. Army Combat Capabilities Development Command's Army Research Laboratory.
"Finding optimal guidance policies for these swarming vehicles in real time is a key requirement for enhancing warfighters' tactical situational awareness, allowing the U.S. Army to dominate in a contested environment," George said.
Reinforcement learning provides a way to optimally control uncertain agents to achieve multi-objective goals when the precise model for the agent is unavailable; however, the existing reinforcement learning schemes can only be applied in a centralized manner, which requires pooling the state information of the entire swarm at a central learner. This drastically increases the computational complexity and communication requirements, resulting in unreasonable learning time, George said.
In order to solve this issue, in collaboration with Prof. Aranya Chakrabortty from North Carolina State University and Prof. He Bai from Oklahoma State University, George created a research effort to tackle the large-scale, multi-agent reinforcement learning problem. The Army funded this effort through the Director's Research Award for External Collaborative Initiative, a laboratory program to stimulate and support new and innovative research in collaboration with external partners.
The main goal of this effort is to develop a theoretical foundation for data-driven optimal control for large-scale swarm networks, where control actions will be taken based on low-dimensional measurement data instead of dynamic models.
The current approach is called Hierarchical Reinforcement Learning, or HRL, and it splits the global control objective into multiple hierarchies -- namely, multiple small group-level microscopic control, and a broad swarm-level macroscopic control.
"Each hierarchy has its own learning loop with respective local and global reward functions," George said. "We were able to significantly reduce the learning time by running these learning loops in parallel."
According to George, online reinforcement learning control of swarm boils down to solving a large-scale algebraic matrix Riccati equation using system, or swarm, input-output data.
The researchers' initial approach for solving this large-scale matrix Riccati equation was to divide the swarm into multiple smaller groups and implement group-level local reinforcement learning in parallel while executing a global reinforcement learning on a smaller dimensional, compressed state from each group.
Their current HRL scheme uses a decupling mechanism that allows the team to hierarchically approximate a solution to the large-scale matrix equation by first solving the local reinforcement learning problem and then synthesizing the global control from local controllers (by solving a least-squares problem) instead of running a global reinforcement learning on the aggregated state. This further reduces the learning time.
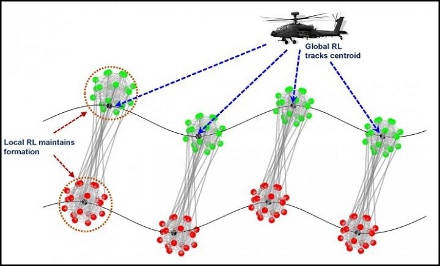
Army researchers envision a hierarchical control for ground vehicle and air vehicle coordination. [Credit: U.S. Army graphic]
Experiments have shown that compared to a centralized approach, HRL was able to reduce the learning time by 80 percent while limiting the optimality loss to 5 percent.
"Our current HRL efforts will allow us to develop control policies for swarms of unmanned aerial and ground vehicles so that they can optimally accomplish different mission sets, even though the individual dynamics for the swarming agents are unknown," George said.
George stated he is confident that this research will be impactful on the future battlefield, and it has been made possible by the innovative collaboration that has taken place.
"The core purpose of the ARL science and technology community is to create and exploit scientific knowledge for transformational overmatch," George said. "By engaging external research through ECI and other cooperative mechanisms, we hope to conduct disruptive foundational research that will lead to Army modernization while serving as Army's primary collaborative link to the world-wide scientific community."
The team is currently working to further improve their HRL control scheme by considering optimal grouping of agents in the swarm to minimize computation and communication complexity while limiting the optimality gap.
They are also investigating the use of deep recurrent neural networks to learn and predict the best grouping patterns and the application of developed techniques for optimal coordination of autonomous air and ground vehicles in Multi-Domain Operations in dense urban terrain.
George, along with the ECI partners, recently organized and chaired an invited virtual session on Multi-Agent Reinforcement Learning at the 2020 American Control Conference, where they presented their research findings (July 1-3, 2020).
Source: U.S. Army Research Lab
Published August 2020
Rate this article
View our terms of use and privacy policy